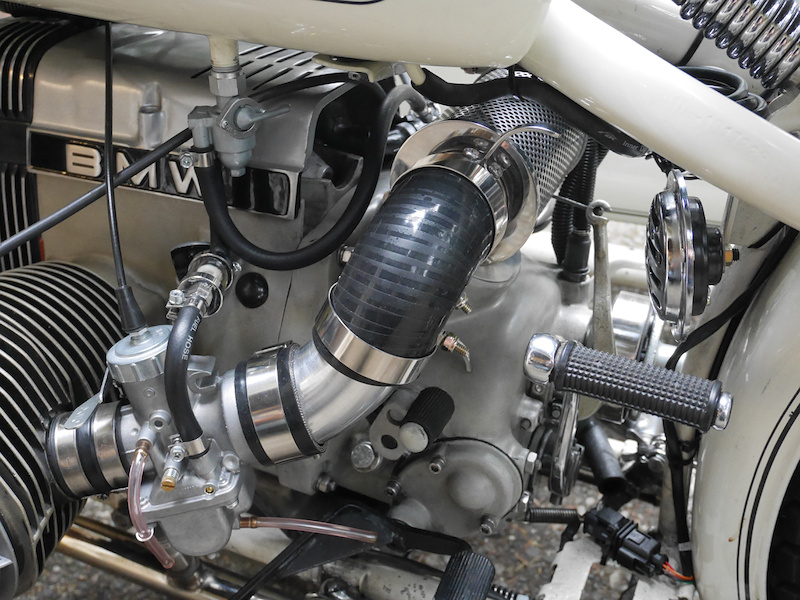
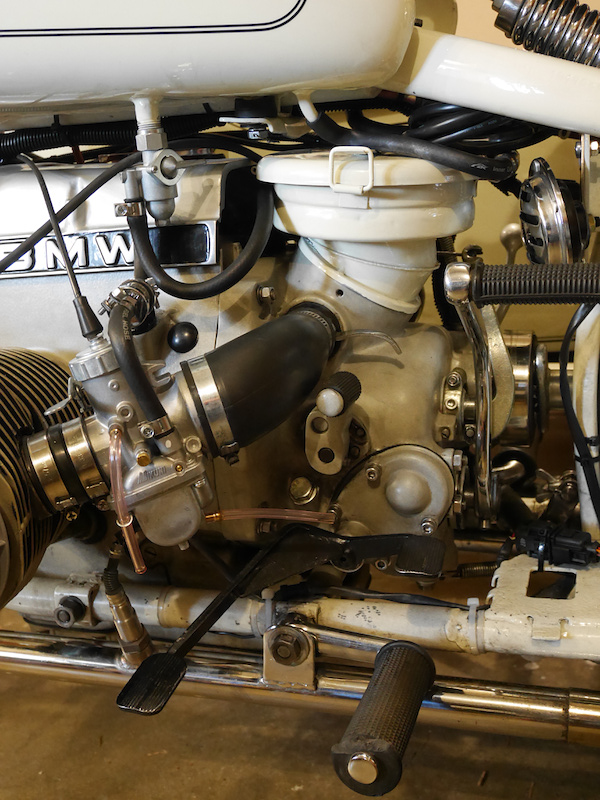
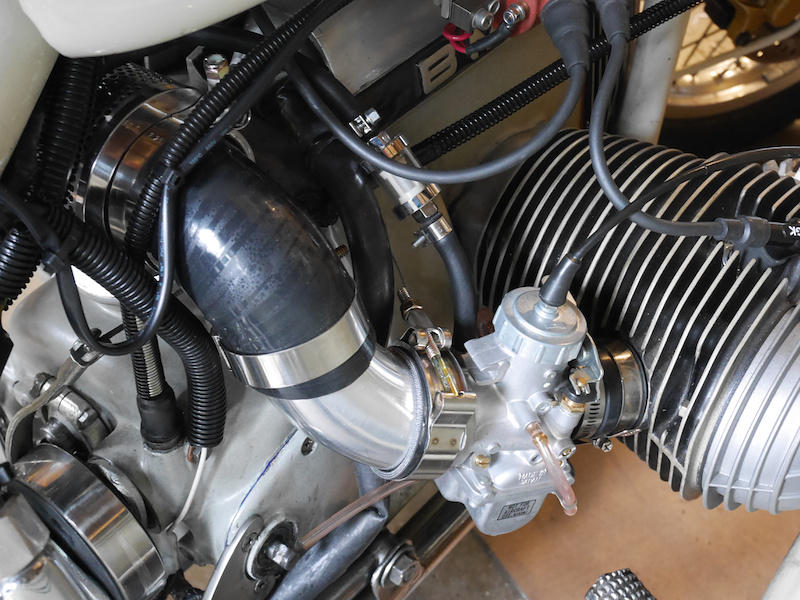
The current airfilter box of my motorcycle is undersized. Way too small and has the wrong connection tubes to the carbs which are not symmetrical. Note the diameter getting larger towards the carbs!
The restricted airflow makes it also very difficult to dial in the correct fuel-air-ratio.
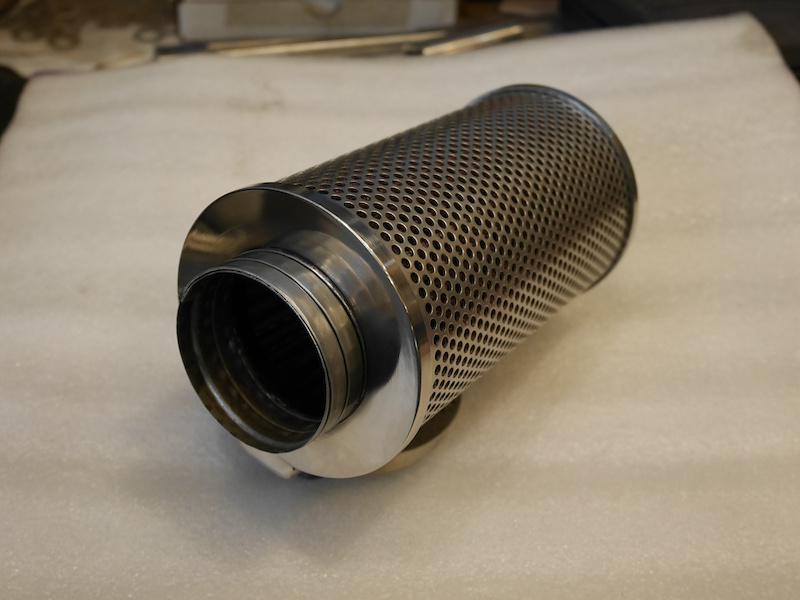
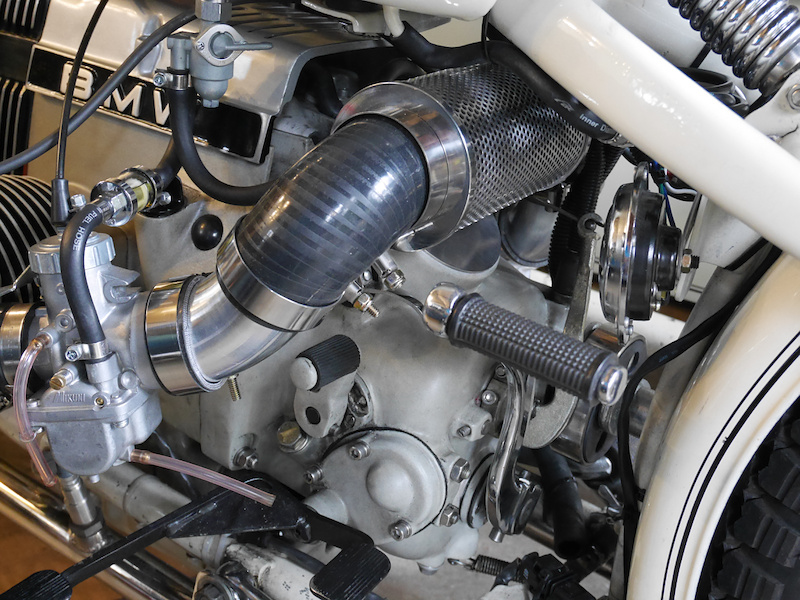
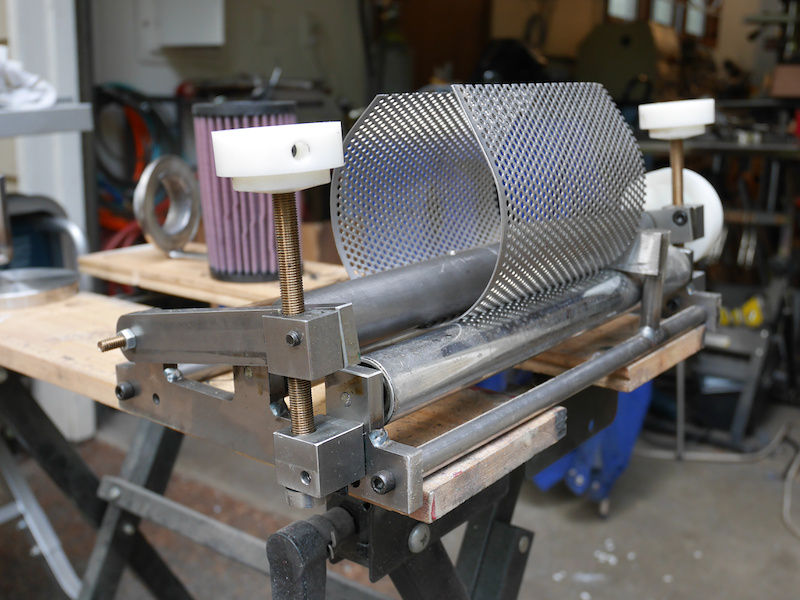
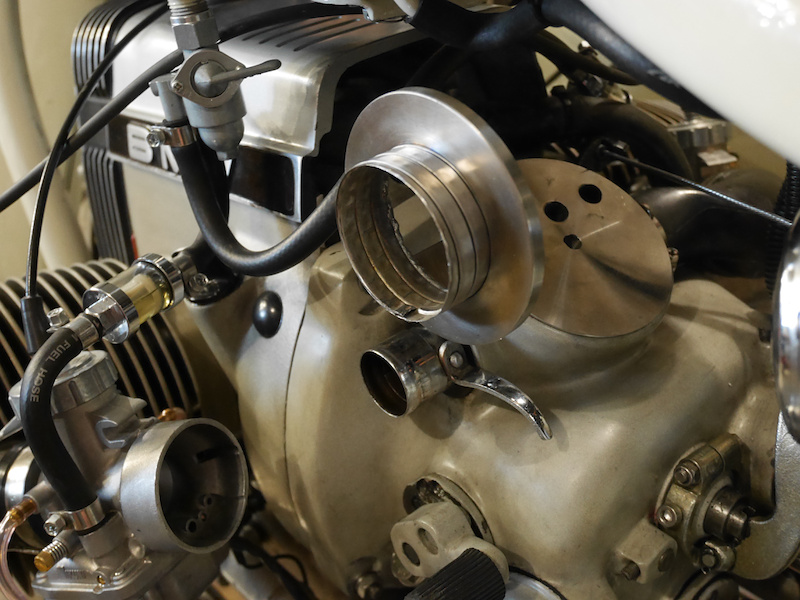
To change this, I designed a new airfilter box that takes care of all the shortcommings:
Using the Optrel Weldcap to watch the sun eclipse seemed like a great idea.
Worked great to begin with, but unfortunately the Weldcap failed after 10min and the auto darkening switched on and off.
Weldcrap! This was quite a unsafe experience. Best thing to do was this:
Driving around with my old BMW is fun, but I noticed oil spots (everywhere).
One of a common spots to leak oil is the transmission output shaft and this where mine was leaking too. The difference is that the leaking oil gets everywhere due to the rotating drive coupler disc.
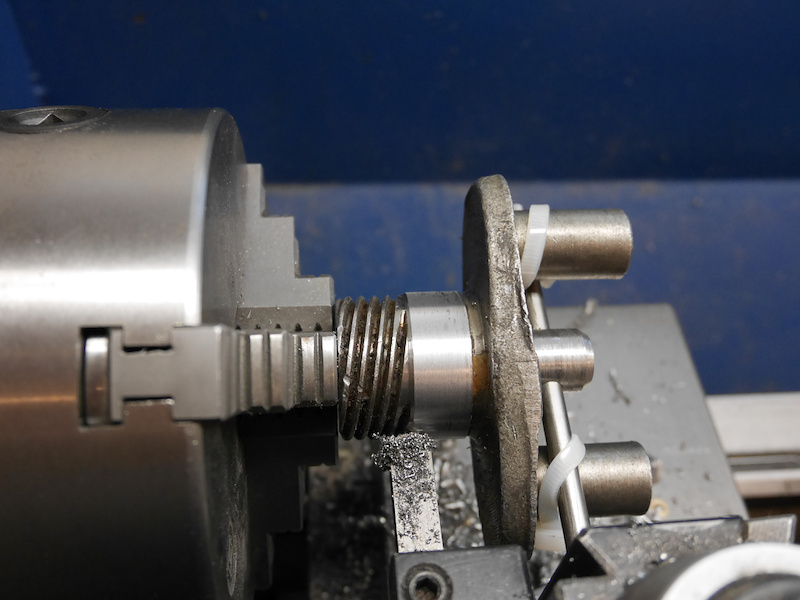
The reason for the leak is that the surface for the seal is not perfect and this post is about to make it perfect.
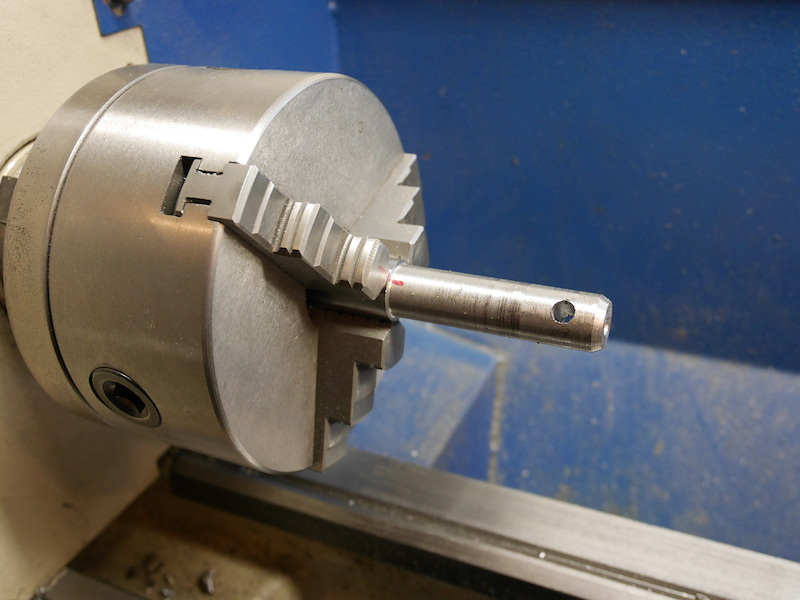
First, a holder is made out of steel starting with a diameter of 16.3mm.
A rod is used as a lathe dog. Unfortunately mounting the shaft the other way around to hook into the jaws didn't worked.
Anyway, the shaft fitted exactly without any play.
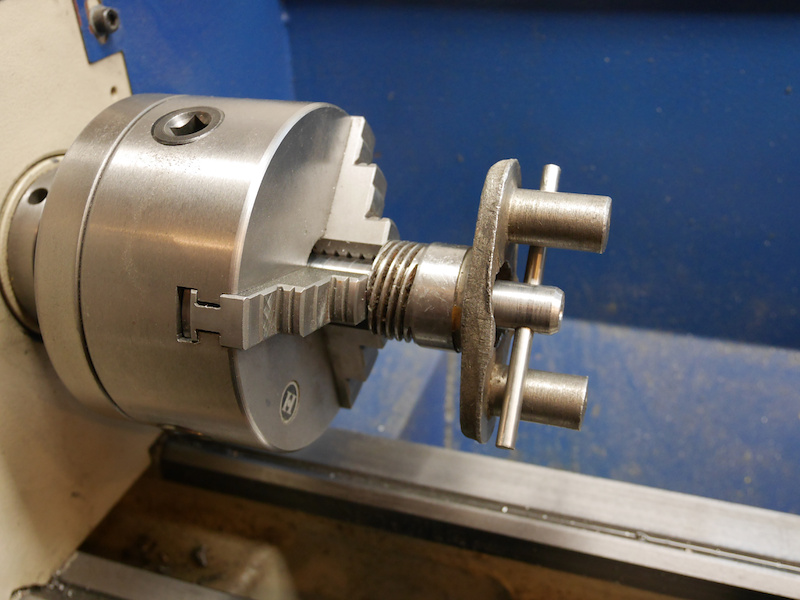
The transmission output shaft is ready for machining:
I noticed that the existing surface was out of balance. Another reason why seals can fail over time.
With several very light cuts, the surface is perfectly machined (MP4 or WMV).
Fine grit sandpaper is used to grind the surface to a smooth finish.
The new sealing surface of the transmission output shaft is finished and ready to use.
Update 06/04/2017:
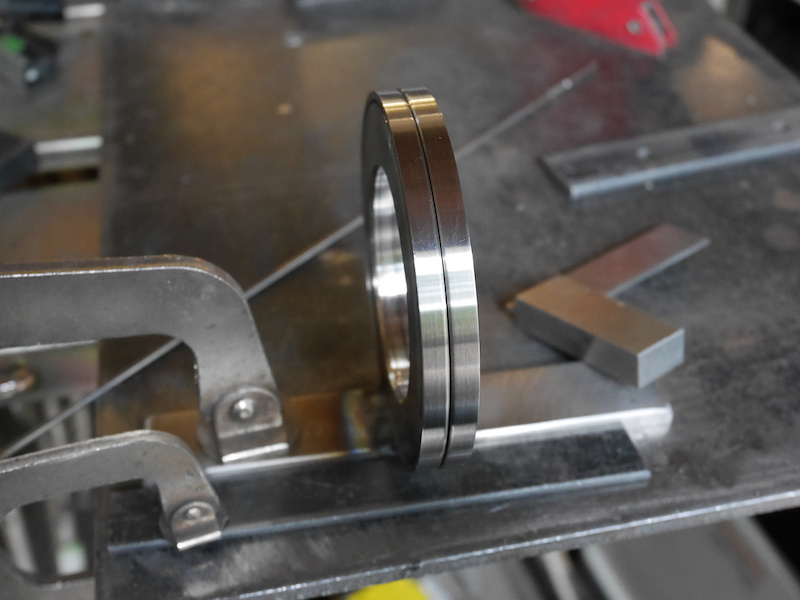
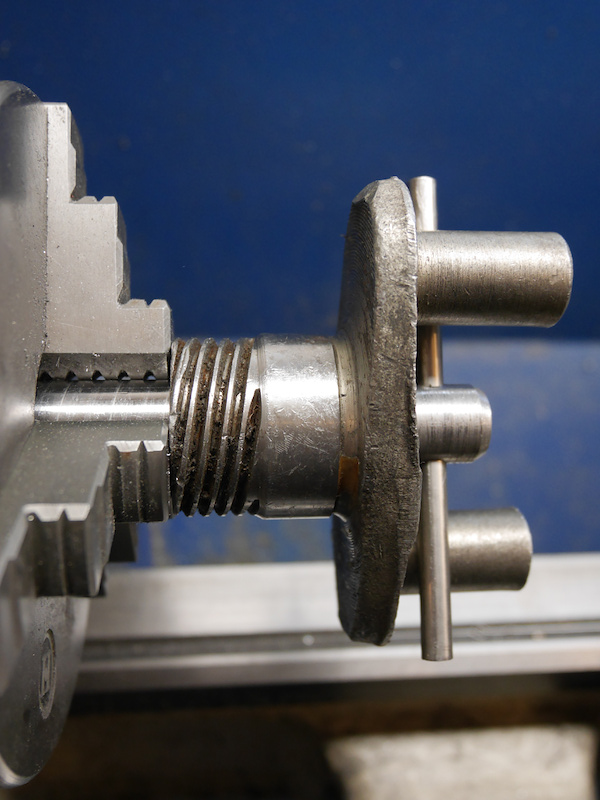
Finished another one. Note the grooves that caused the leak!
Diameter was machined from 36.7mm to 36.55mm. We put it back in and drove around all day.
Perfectly sealed and no oil spill anymore using the same oil seal (48x36x8).
Update 06/22/2017:
And another one:
Update 04/30/2023:
Using 400 grit sandpaper is still too smooth for the sealing surface. See the
Oil Seal post.
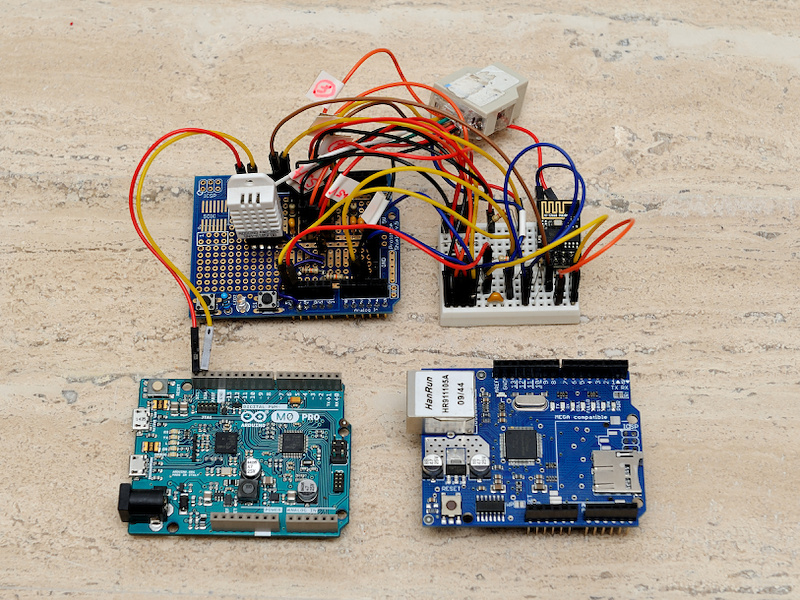
Using a Arduino M0 Pro to power a weather station to measure wind speed/direction, humidity and temperature inside and outside, barometric pressure and rainfall, support REST API for the weather app and HTTP Server:
The white sensor is a DHT22 to measure the humidity and temperature inside.
The 8 pin DIP on the experimental board is a 24LC256 (32KB) to hold weather data statistics.
The wireless module is already connected and will be used later to upload data to the Azure IOT hub.
First test with the weather station to check the directional sensor and the areometer signal.
The weather station is a very popular model, but the documentation has a wrong value for the resistance for one direction.
Here is the correct list:
Direction (Degrees)
Resistance (Ohms)
Voltage (V=5v, R=10k)
0
33k
3.84v
22.5
6.57k
1.98v
45
8.2k
2.25v
67.5
891
0.41v
90
1k
0.45v
112.5
688
0.32v
135
2.2k
0.90v
157.5
1.41k
0.62v
180
3.9k
1.40v
202.5
3.14k
1.19v
225
16k
3.08v
247.5
14.12k
2.93v
270
120k
4.62v
292.5
42.12k
4.04v
315
64.9k
4.33v
337.5
21.88k
3.43v
This translates to the following analog values using the recommended 10K resistor. The analog2index function returns the index (the wind direction) of the received value from the Arduino analog input port. Since the differences between the individual values is not constant, this mapping is the most precise mapping to get the wind direction.
const int analogwerte[] = {
787,
406,
461,
84,
93,
66,
185,
127,
287,
244,
631,
601,
947,
828,
887,
703
};
const int8_t richtungen = sizeof(analogwerte) / sizeof(int);
int8_t analog2index(const int analogwert)
{
// nächsten Wert zu analogwert in analogwerte suchen
int t = 20; // Starttoleranz: +-20
int index = -2; // return -1 für Fehler
for(int8_t i = 0; i < richtungen; i++)
{
const int d(abs(analogwert - analogwerte[i]));
if(d < t)
{
t = d;
index = i;
}
}
return index / 2;
}
The installation:
Everything is packed and pulled up by rope up to the roof.
Bolted to the chimney.
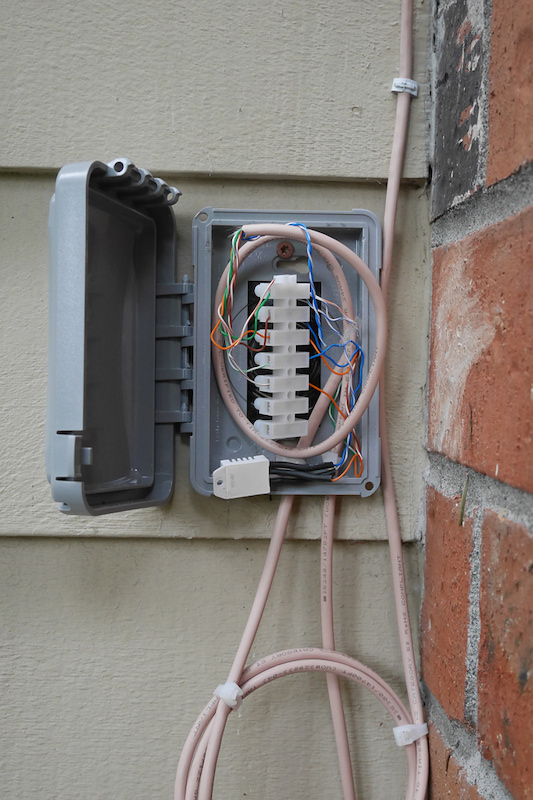
The junction box hosting the outdoor sensor for humidity and (shadow) temperature.
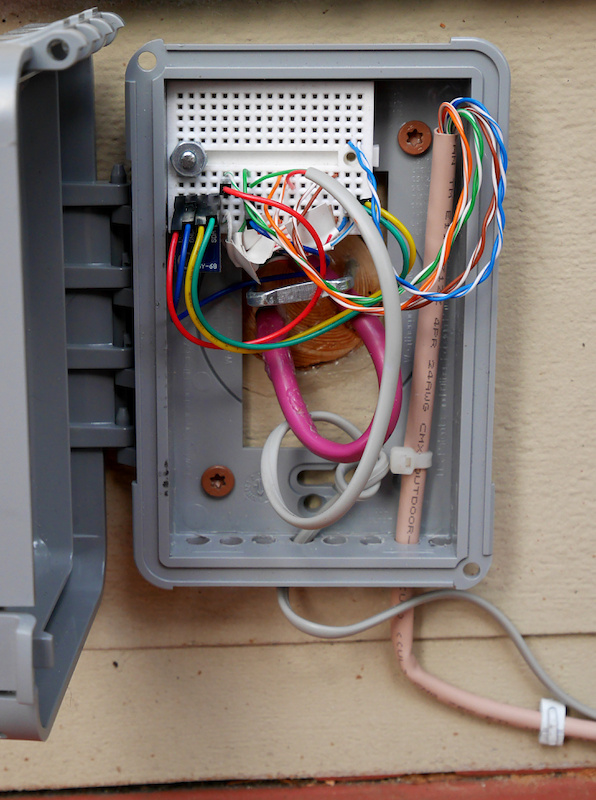
The main junction box hosting the barometric pressure sensor (BMP180) including the second outdoor temperature.
The barometric pressure sensor is located on the lower left of the experimental board.